
کد متلب طراحی کنترل کننده ی PID در متلب + دانلود

سرویس آموزش و آزمون برق نیوز: در متلب میتوان کنترل کنندهی PID را به دو روش مختلف تعریف کرد.
روش (۱) کنترل کننده PID را از تابع انتقال آن تعریف میکند
روش (۲) از تابع pid () برای تعریف یک کنترلر PID استفاده میکند.
بخش اول پاسخ توابع انتقال زمان پیوسته و پارامترهای کنترل کننده PID را برای هر یک از دو روش بالا به خروجی میدهد. توجه شود که تابع انتقال از روش (۱) باید همان پاسخی را بدهد که در روش (۲) محاسبه شده است.
به عنوان مثال سیستم جرم و فنر در نظر گرفته شده است.
در ابتدا میتوانیم تابع انتقال و پاسخ مرحله بعدی را برای این سیستم مدل کنیم. سپس از همان سیستم استفاده میکنیم و یک کنترل کننده PID به آن اضافه میکنیم.
سپس میتوانیم تابع انتقال این سیستم را از تبدیل لاپلاس معادله حرکت سیستم محاسبه کنیم.
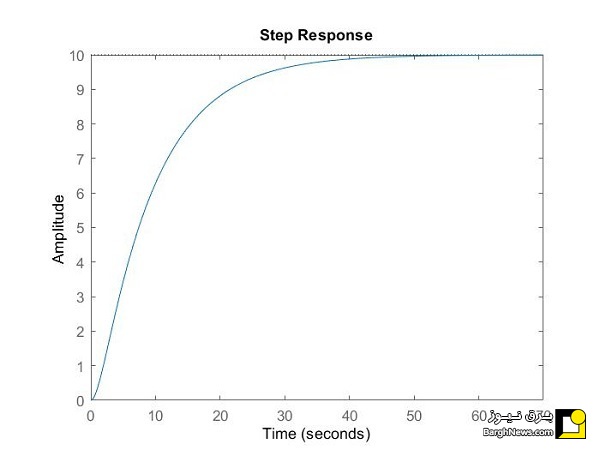
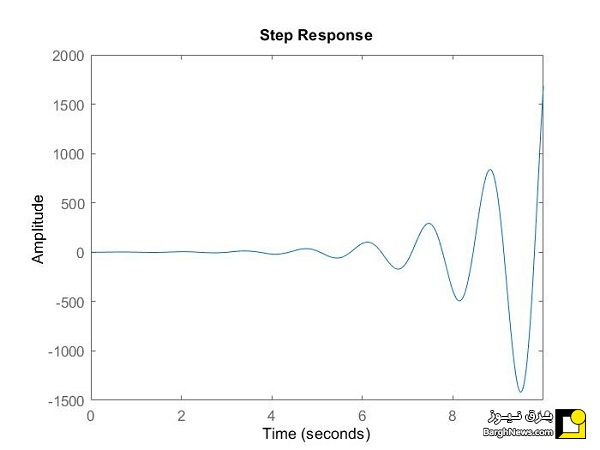
در مرحلهی بعد باید نموداری با پاسخ پله حلقه باز (PID خاموش) سیستم جرم-فنر مشاهده کنید.
از این تصویر برای مقایسه با تصاویر مراحل بعدی استفاده کنید تا ببینید چگونه افزودن هر یک از کنترلهای PID بر پاسخ پله تأثیر میگذارد.
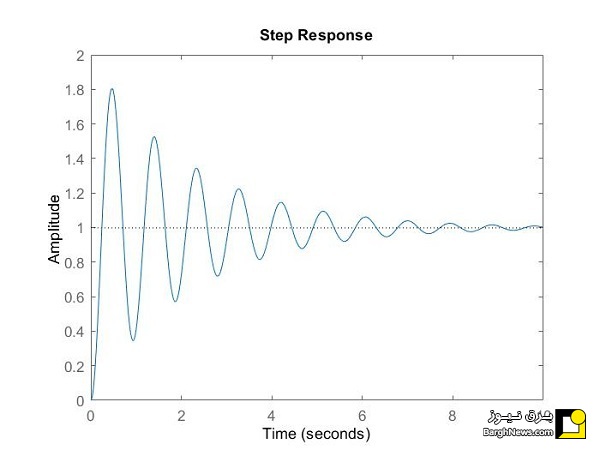
مرحله دوم افزودن کنترل کننده تناسبی:
اکنون کنترل کننده تناسبی را به سیستم اضافه میکنیم. مرحلهی قبل را اجرا کنید تا از همان مقادیر برای جرم، میرایی، سفتی و نیرو برای قوام استفاده کنید. با مقادیر مختلف بهره متناسب بازی کنید تا ببینید پاسخ چگونه به نظر میرسد، آن را با پاسخ حلقه باز و پاسخهای سایر مقادیر بهره متناسب مقایسه کنید.
چیزی که باید ببینید این است که با افزایش بهره متناسب، Kp، زمان صعود و پاسخ پله کاهش مییابد، اوور شوت افزایش مییابد و خطای حالت پایدار کاهش مییابد.
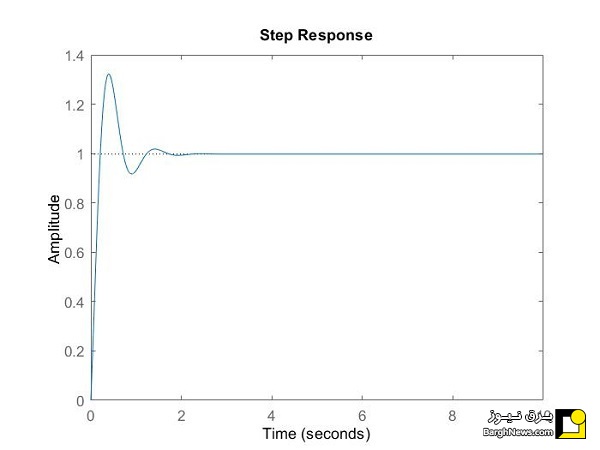
مرحله سوم افزودن کنترل کننده تناسبی-مشتق گیر:
این مرحله پاسخهای مرحلهای را با تنظیم دو مقدار مختلف Kp و Kd ترسیم میکند. برای ثبات، ابتدا نمونههای قبلی را اجرا کنید. سعی کنید Kp را ثابت نگه دارید و ببینید وقتی Kd را تنظیم میکنید چه اتفاقی میافتد.
در این حالت باید ببینید که افزایش بهره مشتق گیر باعث کاهش اوورشوت و زمان نشست پاسخ پله میشود.
مرحله چهارم افزودن کنترل کننده تناسبی-انتگرال گیر:
اکنون کنترلر مشتق گیر را خاموش کرده و کنترلر انتگرالی را تنظیم میکنیم. همان پروتکل قبلی در ادامه میآید. دوباره سعی کنید بهره تناسبی را ثابت نگه دارید و بهره انتگرال گیر را تنظیم کنید تا ببینید چه اتفاقی میافتد.
با افزایش بهره انتگرال، باید ببینید که بهره انتگرال زمان صعود را کاهش میدهد و اوور شوت سیستم را افزایش میدهد؛ که ممکن است یافتن یک پاسخ خوب با ارزش نسبتاً زیاد دشوار باشد
مرحله پنجم افزودن کنترل کننده PID:
در نهایت از هر سه بهره استفاده میکنیم و یک کنترلر PID کامل را راه اندازی میکنیم. در این حالت، سعی کنید پارامترهایی را بیابید که اوورشوت و خطای حالت پایدار را با سریعترین زمان صعود ممکن حذف میکند.
نحوه طراحی یک کنترلر PID:
(۱) با یک پاسخ حلقه باز شروع کنید تا ببینید چه چیزی را باید تنظیم کنید.
(۲) Kp را برای کاهش زمان صعود اضافه کنید.
(۳) Kd را برای کاهش اوورشوت اضافه کنید.
(۴) Ki را برای کاهش خطای حالت پایدار اضافه کنید.
(۵) Kp، Ki و Kd را تنظیم کنید تا به یک پاسخ بهینه دست یابید که نوسان نمیکند.
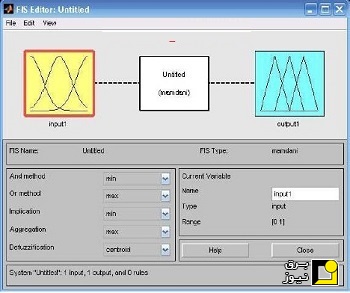
تنظیم خودکار PID:
MATLAB دارای یک عملکرد داخلی است که به شما امکان میدهد پارامترهای یک کنترلر PID را برای دستیابی به پارامترهای بهینه در رابط کاربری گرافیکی تنظیم کنید.
روی " Show Parameters " کلیک کنید تا ببینید چه چیزی را تنظیم میکنید و با پارامترهای مختلف بازی کنید.

برای دانلود mfile متلب طراحی کنترل کننده PID کلیک کنید.




از ارسال دیدگاه های نا مرتبط با متن خبر، تکرار نظر دیگران، توهین به سایر کاربران و ارسال متن های طولانی خودداری نمایید.
لطفا نظرات بدون بی احترامی، افترا و توهین به مسئولان، اقلیت ها، قومیت ها و ... باشد و به طور کلی مغایرتی با اصول اخلاقی و قوانین کشور نداشته باشد.
در غیر این صورت، «برق نیوز» مطلب مورد نظر را رد یا بنا به تشخیص خود با ممیزی منتشر خواهد کرد.